| Accueil Robots | Nimes 2005 | Nimes 2006 |
Nantes

C’est la troisième version du prototype préparé pour le concours de mini-sumo.
.
ESCAP,
réalisé complètement pour tester les
différents principes,
.
R2D2, réalisation
du châssis et de la motorisation,
ESCAP
Le premier robot ESCAP, a été réalisé complètement sur les aspects mécanique, électronique de commande et programmation. Le robot ESCAP fonctionnait vers Noël 2004, mais il présentait finalement trop de défauts pour être présenté au concours :
. adhérence insuffisante pour pousser son propre poids,
. couple insuffisant pour pousser un adversaire,
. vitesse trop rapide pour s’arrêter de manière fiable sur la ligne blanche.
La mécanique de ESCAP utilise :
. 2 moto-réducteurs ESCAP (moteur avec réducteur 1:128)
. 2 roues de voiture radiocommandée (pneu lisse > diamètre 44mm – largeur 25mm)
|
|
|
| 300 grammes de mécanique | 500 grammes au total |


R2D2
Le second prototype R2D2, a été réalisé partiellement : châssis mécanique et motorisation. Les principaux défauts de R2D2 étaient :
. vitesse excessive et besoin impératif de l’alimenter en 3 Volts,
. extrême légèreté, voire fragilité pour résister à un combat.
La mécanique de R2D2 est basée sur :
. 2 moto-réducteurs miniatures,
. 2 jantes de voiture équipées avec un bandage caoutchouc issu d’un rouleau d’imprimante
|
|
 |
| châssis aluminium découpé, percé et plié | bandage de roue : galet d’imprimante |

TOUTENKAMON … NANTES
Le troisième prototype, TOUTENKAMON a été réalisé entièrement avant la fin du mois de mars 2005 et finalement présenté au concours sous la désignation de NANTES.
Les défauts de TOUTENKAMON étaient :
. sa gourmandise en courant (500 mA à vide) et le dégagement de chaleur associé,
. son adhérence limitée, manque de fiabilité du programme de commande, …
|
Objet |
Eléments
et composants |
Caractéristiques |
|
Mécanique |
Châssis en aluminium pour fixer : . les détecteurs de ligne, . les moto-réducteurs, . les colonnes des plateaux électroniques |
plaque 10 cm x 10 cm épaisseur 1.5 mm détourage des roues
|
|
|
Superposition des plateaux électroniques entre les roues et au-dessus des moteurs : . puissance moteurs et interfaces des capteurs . PIC, LED et ICSP . capteurs de proximité |
4 entretoises position 50 mm x 50 mm |
|
|
Bloc avant supportant : . les télémètres SHARP, . le pare-chocs et les micro-rupteurs |
aluminium percé, plié hauteur 15 mm |
|
Puissance |
Alimentation : 2 piles 9V |
montage des piles en parallèle longueur des 2 piles = 10 cm |
|
|
Régulation 5V unique pour : . la puissance des moteurs et . la commande logique |
2 régulateurs 7805 en parallèle avec 100 uF + 100 nF |
|
|
Interrupteur général |
sur le circuit 9V |
|
|
Circuit pour moteurs pont en H L298N |
2 A par voie montage de 8 diodes BYV 28-200 |
|
Motorisation |
2 moteurs : RE280 vitesse à vide 8000-10000 tr/mn |
alimentation 5V maxi consommation 300mA/moteur à vide consommation : X4 en charge |
|
|
2 réducteurs mécaniques |
3 étages - ratio 30 : 1 vitesse : 300 tr/mn ou 5tr/s traversée du dohyo en 1 seconde |
|
|
Antiparasitage |
3 condensateurs 47 nF ferrite sur fil d’alimentation |
|
Roue |
2 galets en plastique rigide |
diamètre 44 mm– largeur 19 mm blocage en rotation : vis 3mm |
|
|
Surface adhérente |
bande hypoallergénique épaisseur 2mm collée sur la jante |
|
Capteurs |
Ligne 4 détecteurs CNY 70 avant, gauche, droite et arrière |
montage avec 22 kW et 220 W |
|
|
Pare-chocs 2 micro-rupteurs |
montage sur 33 kW |
|
|
Proximité 3 détecteurs IS471 FSH avant, gauche, droite |
montage avec 15 W et 220 nF |
|
|
Distance 2 télémètres SHARP GP2D02 gauche et droite dirigés vers l’avant |
numérique 10 à 80 cm montage avec 2 diodes 1N4148 |
|
PIC |
PIC16F876 – 4 MHz |
programmation en C – 500 lignes |
|
|
Mouvements possibles : Avant – Avant droit – Avant gauche – Droit – Gauche – Arrière droit – Arrière gauche – Arrière |
|
 |
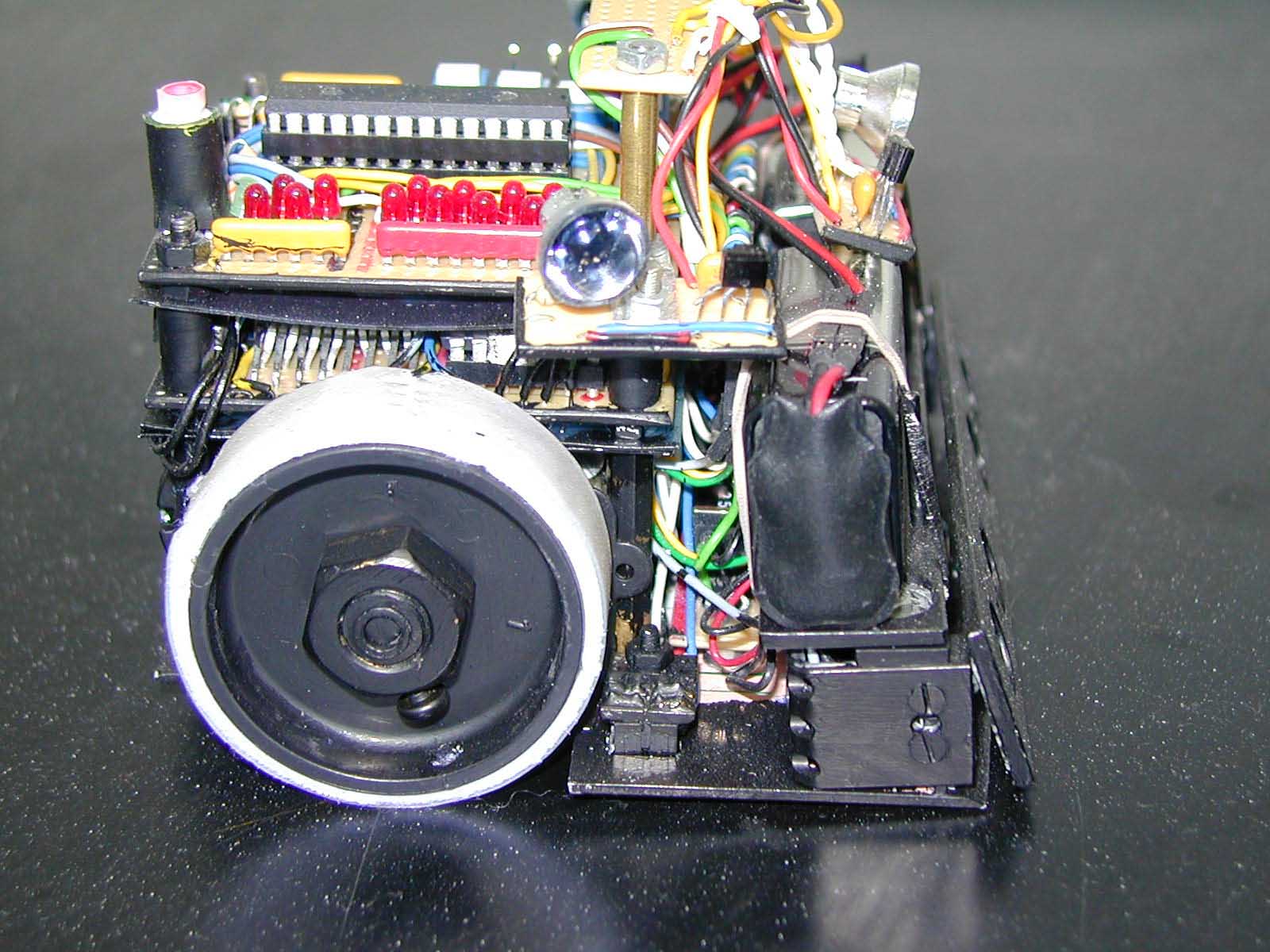 |
 |
| Vue de dessus | Vue de cote | vue de dessous |
TWINGA
dans la
catégorie des
collégiens (robot filoguidé)
 |
|
| catégorie des collégiens : robot Twinga | match : Twinga vs Lycée |
|
|
|
| match : Twinga vs Nordist’Elec |
match : Twinga vs Nordist’Elec |



{kind=link}
{kind=link}
{kind=link}